








文|黃滿婷
與蓬勃發(fā)展的室內(nèi)AGV相比,室外AGV的市場一直以來被看做潛力巨大的藍海,開墾進度卻緩慢,究其原因,主要還是室外導(dǎo)航的技術(shù)的研發(fā)難度過大且成本過高。
室外AGV導(dǎo)航的發(fā)展進程
室外AGV顧名思義就是在室外工作的AGV小車,室外AGV的主要場景有園區(qū)不同廠房之間的物料配送、港口碼頭的貨物裝卸、室外巡檢、無人配送。此外,還包括一些特殊行業(yè)中,如農(nóng)林業(yè)自動割草機、自動插秧機等……
根據(jù)不同的應(yīng)用場景與需求,室外AGV導(dǎo)航方案各不相同。就目前來說,在固定路線中磁釘導(dǎo)航的應(yīng)用相對成熟穩(wěn)定,而在需要自主導(dǎo)航的環(huán)境中則以激光或視覺為主,環(huán)境越復(fù)雜輔助傳感器也就越多,精度與速度需求越大,越接近于無人駕駛技術(shù)的原則。
在AGV室外應(yīng)用場景中,園區(qū)廠房間配送及巡檢的導(dǎo)航方式相對來說比較簡單。在這些簡單的場景中,由于道路軌跡相對固定,巡檢或搬運AGV一般只需鋪設(shè)磁導(dǎo)航就能實現(xiàn)物料搬運或巡檢工作。
磁導(dǎo)航的優(yōu)勢是性價比高且安裝方便,且不會受到光照、天氣或其他障礙物的影響;不過磁導(dǎo)航的劣勢也很明顯,柔性化程度過低,需要對道路進行改造,不便于大規(guī)模推廣,應(yīng)用場景受到嚴重限制。
盡管如此,在碼頭港區(qū)應(yīng)用的室外AGV中,同樣也有大量的磁導(dǎo)應(yīng)用。不過受港口環(huán)境高度動態(tài)變化影響, 港口AGV要和大型機械進行互動并融入碼頭的生產(chǎn)業(yè)務(wù)流程,單靠一種傳感器無法實現(xiàn)精準(zhǔn)定位。因此,港口AGV一般采用混合導(dǎo)航的方式來彌補單一導(dǎo)航技術(shù)的不足,磁釘加慣導(dǎo)相結(jié)合的導(dǎo)航方式應(yīng)用的最為普遍。

室外自主導(dǎo)航的崛起
近年來,隨著需求和導(dǎo)航技術(shù)的發(fā)展,室外的無軌導(dǎo)航也漸漸開始增多。無軌導(dǎo)航一般以激光或視覺導(dǎo)航為主。在簡單的非標(biāo)環(huán)境下,如物流園區(qū)等,室外導(dǎo)航需要配備激光傳感或視覺傳感來實現(xiàn)自主導(dǎo)航,如國自在上海大眾和安吉物流園區(qū)應(yīng)用的激光導(dǎo)航室外牽引式AGV,采用的是激光環(huán)境導(dǎo)航技術(shù),通過測量式激光,輔以慣導(dǎo)技術(shù),實現(xiàn)非標(biāo)環(huán)境下的室外自主導(dǎo)航。
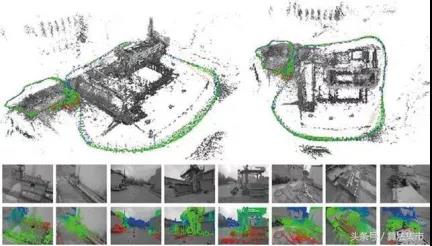
不過在一些室外大場景中,盡管柔性化水平上已經(jīng)得到大幅改善,但激光導(dǎo)航或視覺的弊端在室外仍舊明顯,室外受光照、惡劣天氣等環(huán)境的影響,僅僅是基于激光或視覺的導(dǎo)航一方面存在盲區(qū),一方面對于長距離駕駛的路徑規(guī)劃和統(tǒng)籌有限。因此,衛(wèi)星定位的重要性不言而喻。
衛(wèi)星定位成室外導(dǎo)航重頭戲
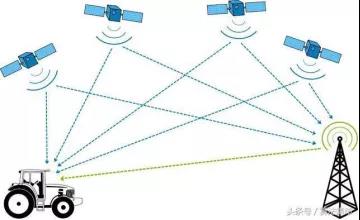
傳統(tǒng)行業(yè)習(xí)慣將衛(wèi)星定位統(tǒng)稱為GPS,事實上全球主要有四大定位系統(tǒng):北斗(BDS),GPS,格雷納斯(GLONASS),伽利略(Galileo),GPS只是其中之一,是一種以空中衛(wèi)星為基礎(chǔ)的高精度無線電導(dǎo)航的定位系統(tǒng)。在使用過程中,真正的衛(wèi)星信號從遙遠的太空趕到地面,尤其要穿過電離層、路途上難免有差池,所以總有數(shù)米的誤差。而使用RTK差分的衛(wèi)星定位方法可實現(xiàn)厘米級定位,且適用于全局定位。
RTK是載波相位差分技術(shù),是實時處理兩個測量站載波相位觀測量的差分方法,網(wǎng)絡(luò)RTK系統(tǒng)用戶設(shè)備主要配置有GNSS接收機及天線。所謂GNSS是對北斗系統(tǒng)(BDS)、GPS、GLONASS、Galileo等衛(wèi)星導(dǎo)航定位系統(tǒng)的統(tǒng)稱,指利用一組衛(wèi)星的偽距、星歷、衛(wèi)星發(fā)射時間等觀測量,以空中衛(wèi)星為基礎(chǔ)的高精度無線電導(dǎo)航的定位系統(tǒng)。全球?qū)Ш叫l(wèi)星系統(tǒng)的優(yōu)點是能在地球表面或近地空間的任何地點可全天候3維坐標(biāo)和速度以及時間信息的空基無線電導(dǎo)航連續(xù)定位。缺點是由于GNSS定位依賴于空間衛(wèi)星,受環(huán)境影響較大,高樓、樹木、隧道可能會屏蔽信號,以及首次定位反應(yīng)較慢。
在環(huán)境變化相對穩(wěn)定的室外場景,室外AGV可通過激光/視覺導(dǎo)航搭配衛(wèi)星定位系統(tǒng)來實現(xiàn)自主移動的室外導(dǎo)航技術(shù)。如安徽宇鋒開發(fā)的一款室外牽引AGV目前已成功應(yīng)用于監(jiān)獄的室外搬運作業(yè)中,該款A(yù)GV采用GPS全球定位系統(tǒng)+多線激光雷達輔助定位系統(tǒng),能夠?qū)崿F(xiàn)無人搬運、無人牽引等多種應(yīng)用功能,在雷雨、高溫、嚴寒的極端天氣也可正常運行。
此外,在農(nóng)業(yè)中無人駕駛設(shè)備也需要應(yīng)用到衛(wèi)星定位。如無人駕駛插秧機,一般需要搭載北斗導(dǎo)航駕駛系統(tǒng),利用北斗定位系統(tǒng)和物聯(lián)網(wǎng)技術(shù)對傳統(tǒng)插秧機進行智能升級改造。操作人員只需通過平板車載終端完成定位及參數(shù)設(shè)置,系統(tǒng)便能自行規(guī)劃最優(yōu)路線,實現(xiàn)田間自動插秧、智能避障、掉頭轉(zhuǎn)彎等全套無人作業(yè)。
不過,在一些需要適應(yīng)大場景、長距離、高速度、室外應(yīng)用為主的自動重載物流場景中,技術(shù)則更為復(fù)雜。“室外應(yīng)用場景市場發(fā)展起來的前提是要解決安全問題,坦率講目前的純激光加衛(wèi)星定位的導(dǎo)航方式在室外應(yīng)用是有一定局限的,受天氣、光照、環(huán)境影響太大,不確定系數(shù)高。”山東蓬翔汽車技術(shù)主任朱廣崗先生表示。
蓬翔汽車研發(fā)的無軌自主導(dǎo)航重載AGV采用的則是GNSS+多線激光+慣導(dǎo)的復(fù)合導(dǎo)航避障方案,另外輔以視覺、毫米波、超聲波等手段進行多重保護。道路情況相對復(fù)雜時,則考慮加裝交通管制系統(tǒng),并在車身上安裝行車記錄儀。
而現(xiàn)階段,通過深度學(xué)習(xí)與算法優(yōu)化,AGV室外導(dǎo)航技術(shù)的優(yōu)化已經(jīng)接近無人駕駛。相比于其他行業(yè)的室外移動機器人,無人配送這種商用領(lǐng)域室外項目向來受到外界關(guān)注,其技術(shù)實現(xiàn)相當(dāng)于L3級別無人駕駛,半封閉環(huán)境或路線相對固定,低速場景風(fēng)險可控,通常通過搭載少量低線束激光雷達、毫米波雷達、視覺slam以及高精度RTK定位模塊即可。
價格居高不下的室外導(dǎo)航將迎來破局之年?
盡管室外導(dǎo)航技術(shù)正在不斷地精進,但在價格上對于應(yīng)用端來說并不友好,因此市場推廣進度也非常緩慢。據(jù)了解,一臺普通的自主導(dǎo)航室外AGV,需要安裝的導(dǎo)航模塊至少是三個,包括激光或視覺傳感器,超聲波或毫米波避障設(shè)施,以及衛(wèi)星定位導(dǎo)航,一臺室外AGV在導(dǎo)航上的花費就需要幾萬元甚至更多。
因此,在諸多室外場景中,往往重工或有特定安全需求的場景對室外AGV的接受度比較高。此外,相較于一般AGV,重載型AGV的利潤更高,而在商用領(lǐng)域無人配送等方面,盡管AGV可實現(xiàn)自主導(dǎo)航,但利用率與投資回報比還不及人工,因此每年的出貨量其實并不多。據(jù)了解,即便是菜鳥、圓通等物流巨頭每年無人配送車出貨也僅僅是十幾臺到數(shù)十臺。
對此,中海達子公司比遜電子技術(shù)總監(jiān)許開華表示,“我們認為,隨著疫情帶來的公共環(huán)境衛(wèi)生的知識普及,預(yù)計在2021-2022年左右,室外移動機器人將得到大規(guī)模的應(yīng)用,屆時室外導(dǎo)航技術(shù)也將實現(xiàn)量產(chǎn)和規(guī)模化,價格有望進一步下降。”
我們也相信,隨著時間的推移,室外導(dǎo)航技術(shù)不但能在工業(yè)、農(nóng)業(yè)、軍事等領(lǐng)域得到有質(zhì)且有量的廣泛應(yīng)用,同樣也將更加廣泛應(yīng)用于人們的日常生活中,為我們提供更多便利服務(wù)。


